地图点
地图点就是真实世界中的点,来自真实世界的三维物体,有唯一的ID,不同图像帧里面的特征点可能对应三维空间中的同一个地图点。
地图点生成
地图点生成在ORB-SLAM2中主要存在于下面几个地方:
- 单目初始化时前两帧会生成一部分地图点,双目初始化通过左右目匹配第一帧就可以生成地图点,RGB-D相机通过测量深度也可以在第一帧生成部分地图点;
- 局部建图线程里面,共视关键帧之间通过LocalMapping::CreateNewMapPoints()函数生成地图点;
- 跟踪线程里面,Tracking::UpdateLastFrame()和Tracking::CreateNewKeyFrame()函数中为双目和RGB-D相机生成新的临时地图点,单目相机不生成地图点。
计算地图点最具代表性的描述子
由于一个地图点会被多个相机图像观测到,因此在插入关键帧后,需要判断是否更新当前点的描述子。
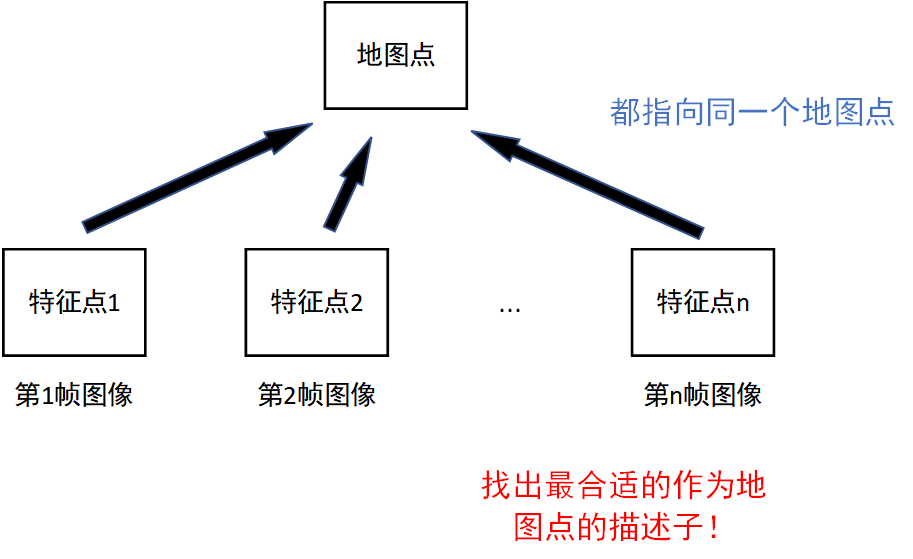
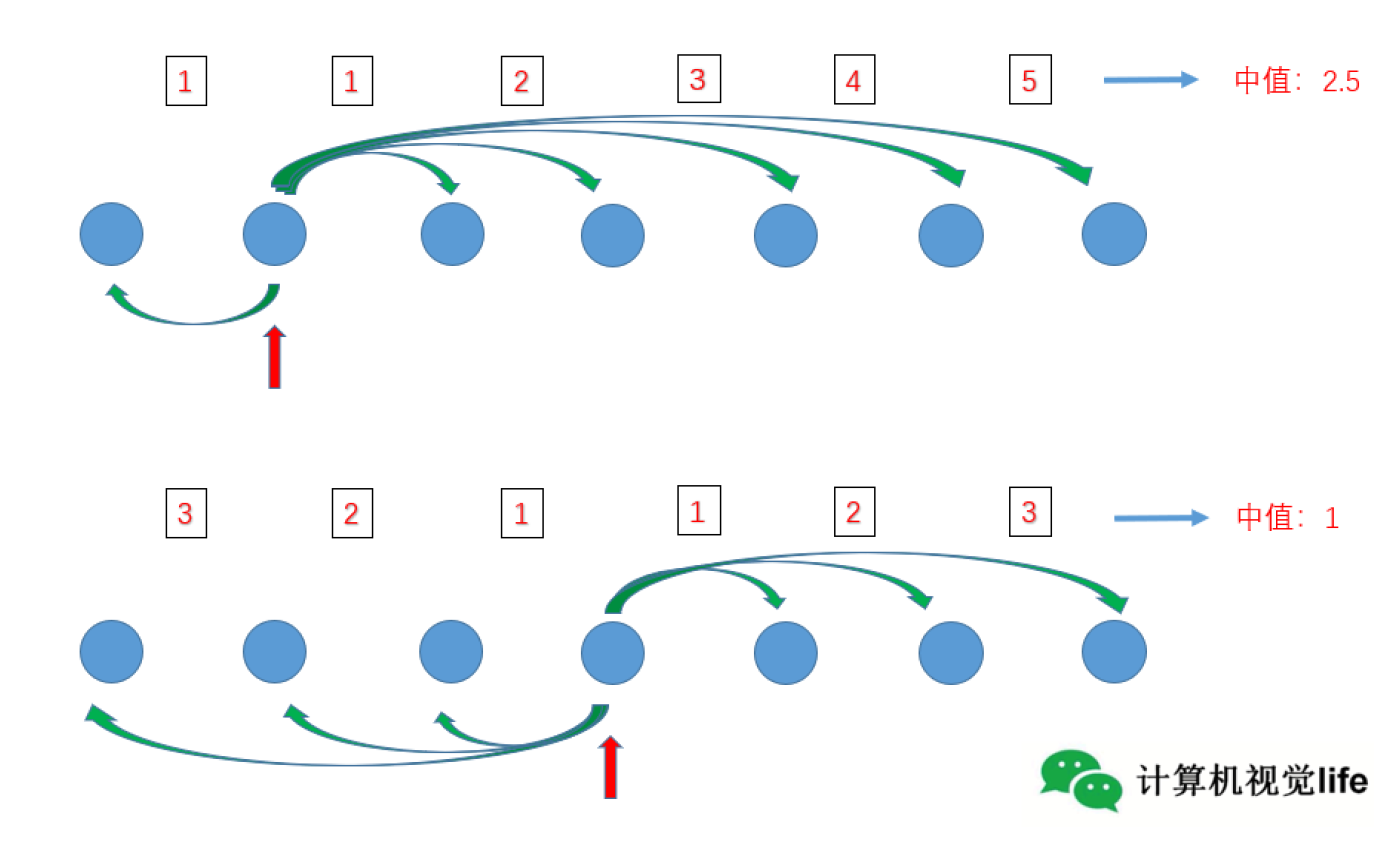
那么代表性描述子如何找出来呢?具体的操作为首先获得当前点的所有描述子,然后计算描述子之间的两两距离。在ORB-SLAM2中,最好的描述子与其他的描述子之间应该具有最小的距离中值。
计算描述子距离
在函数ORBmatcher::DescriptorDistance()中,通过汉明距离进行计算
汉明距离:汉明距离是一个概念,它表示两个(相同长度)字符串对应位置的不同字符的数量,我们以d(x,y)表示两个字x,y之间的汉明距离。对两个字符串进行异或运算,并统计结果为1的个数,那么这个数就是汉明距离。
举个例子,1011101和1001001之间的汉明距离是2,因为第三位和第六位不同。
由于BRIEF描述子是一堆二进制串,所以通过汉明距离计算非常方便
ORB-SLAM2中计算BRIEF描述子汉明距离的代码如下:
1 | //pa,pb是两BRIEF描述子,每个描述子8*32=256位 |
对这段代码进行解读,这段代码实际上使用了一个泛用的算法,叫SWAR算法,用于计算二进制数中1的个数。整体思路就是先将相邻2位的1的数量计算出来,结果存放在这2位。然后将相邻4位的结果相加,结果存放在这4位,将相邻8位的结果相加,结果存放在这8位。最后计算整体1的数量,记录在高8位,然后通过右移运算,将结果放到低8位,得到最终结果。
SWAR算法通过先将数字进行最细力粒度的拆分,然后每一步都对上一次的计算结果进行整合,最终得到整体结果。由于这里处理的是32位数,所以这个算法比遍历算法快32倍,也不需要消耗额外内存空间。
地图点平均观测方向、观测距离范围
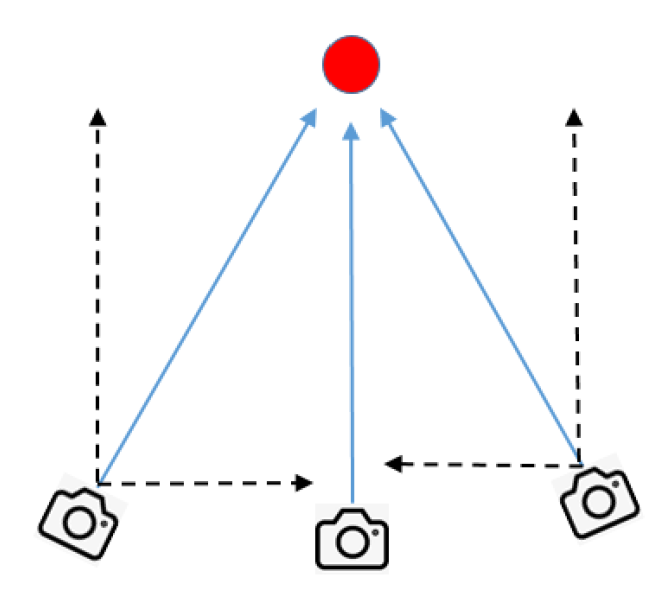
对于观测到某一地图点的全部关键帧,对该点的观测方向归一化为单位向量,然后进行求和得到该地图点的朝向。
1 | void MapPoint::UpdateNormalAndDepth() |
关键帧
关键帧就是几帧图像里面比较有代表性的那一帧,可以大概的把它的重要程度比作一幅图像中的特征点。
关键帧的好处
- 相邻帧之间的信息冗余度很高,通过关键帧可以降低信息冗余度。比如相机放在原地不动,普通帧一直在累加,但是关键帧始终不变;
- 关键帧是普通帧滤波和优化的结果,可以增加定位的准确性;
- 关键帧的主要作用是面向后端的算力和精度的折中,使得有限的资源能够用在刀刃上。就好像现在还处于社会主义初级阶段,不能够使所有人都富起来,只好让一部分人先富起来,先富带动后富,最后等生产力极大发展(算力爆炸)后,才能实现所有人一视同仁。
如何选择关键帧
目前来说,主要的指标主要有下面这些:
- 时间尺度,距离上一关键帧之间的帧数不能太少,但是搁多少帧选择关键帧是个问题;
- 运动尺度,计算运动累积的多少,每移动一定的距离就选一个关键帧,但是这样的话如果对着一个物体来回扫就会出现大量相同关键帧;
- 根据共视特征点的数量,记录下当前视角下的特征点的数量或者比例,当相机离开场景时才新建关键帧,缺点是数据结构和逻辑比较复杂。
在ORB-SLAM2中,后期的局部建图和全局BA都是只用关键帧来操作了,在跟踪线程中选择关键帧,这时候的选择标准还比较宽松,在局部建图线程,会根据共视冗余度对关键帧进行剔除,剩下这些才是真正用到的关键帧。
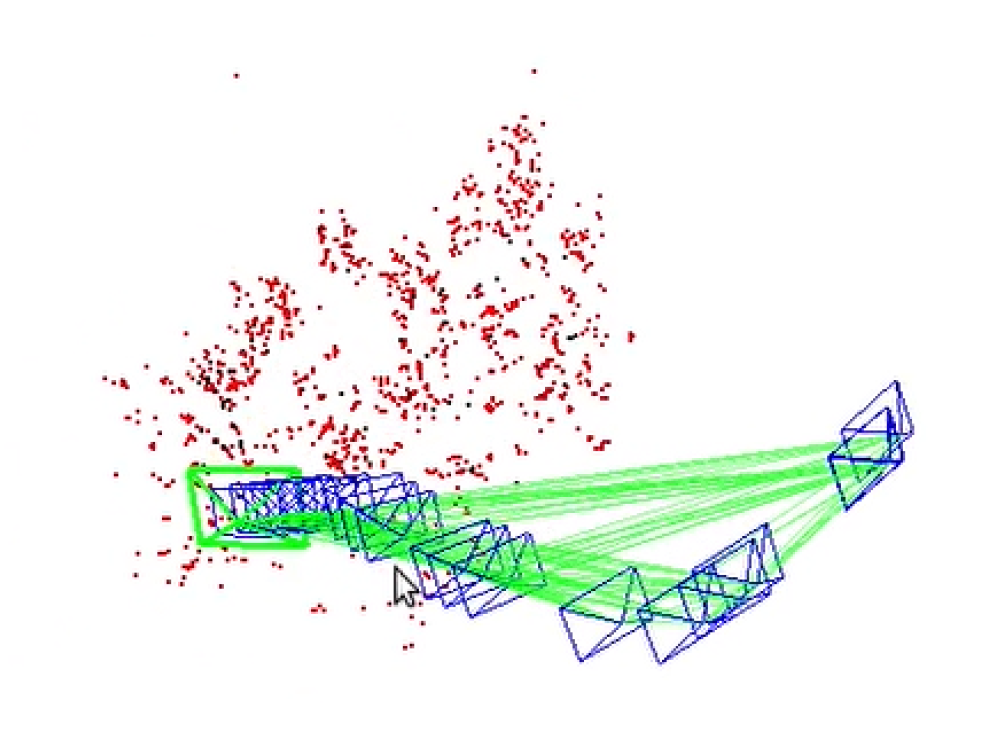
共视图
共视图是无向加权图,每个节点都是关键帧,如果关键帧之间满足一定的共视关系(在ORB-SLAM2中的标准是至少有15个共视地图点),就连成一条边,这条边的权重就是共视地图点的数目。
共视图的作用
- 跟踪局部地图,扩大搜索范围;
- 关键帧之间新建地图点;
- 闭环检测以及重定位检测;
- 优化。
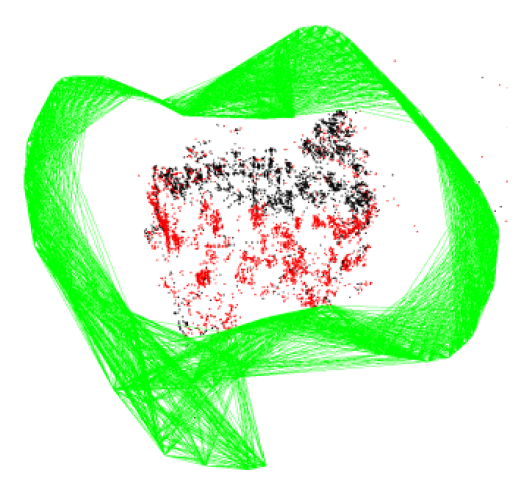
本质图
共视图比较稠密,本质图比共视图稀疏很多,关键帧作为节点,但是连接边更少,只保留了联系紧密的边。在本质图中,主要包含了
- 生成树之间的连接关系;
- 形成闭环的连接关系;
- 共视关系非常好的连接关系。
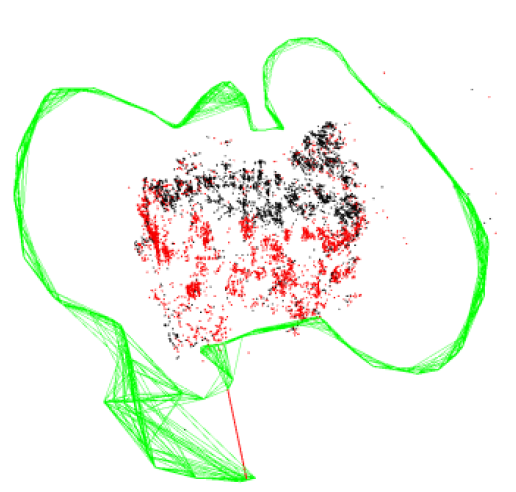
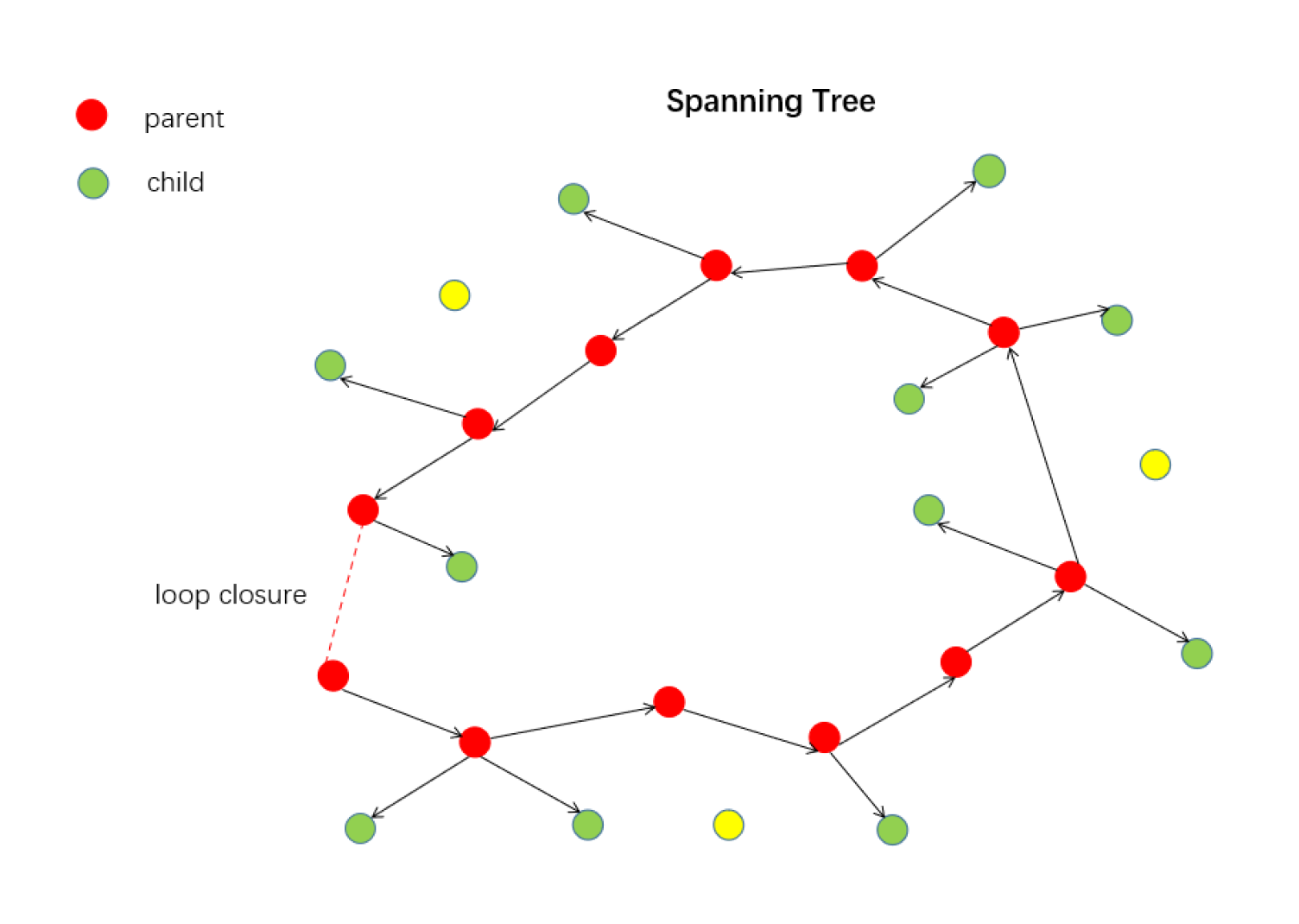
生成树
生成树由子关键帧和父关键帧构成,也就是共视关系最高的帧,只要子关键帧存在父关键帧就生成连接关系,不然就被孤立,如下图中黄色的线。